- Prof. Dancy's Site - Course Site -
Learning Rule-Based Expert Systems Using Python ACT-R
Paired Programming (Group of 2) Optional
Final Submission Due (Area/Cohort 1): 04-March-2021 Final Submission Due (Area/Cohort 2): 23-April-2021
If you haven't done so already, Create a new repo on Gitlab called CSCI357-SP21
- Rule-Based Expert Systems (basically) allow you to create intelligent systems using a series of If->Then style production rules
For this assignment, we are going to use the Python ACT-R Cognitive Architecture to build our Rule-Based Expert Systems
-
Why ACT-R?
- Though ACT-R has many components that can make it a very useful system for representing intelligent behavior (especially behavior that is human-like), we will be using it for it's central production system, which uses rules to define the behavior of it's central executive system (the "Production System" in Figure 1).
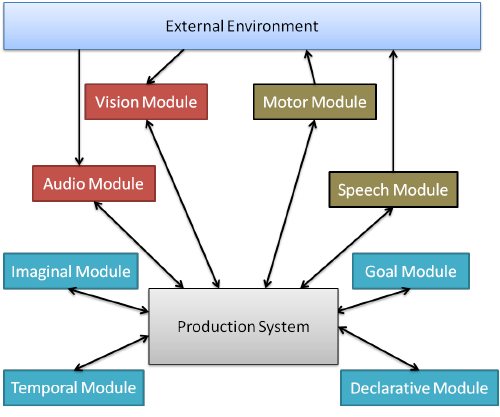
Figure 1: A high-level view of ACT-R, from (Dancy et al., 2015)- We will use ACT-R as a way to give you an opportunity to use a full system to create rule-based agents and as a way to give you an experience with a well studied Cognitive Architecture
- By using Python ACT-R (instead of the canonical LISP version) you also get to use ACT-R to create agents that is more like more designing a program. Canonical ACT-R actually now includes a way to connect to Python (and even create ACT-R agents using only Python), but this version works well enough for our purposes.
Setting up your environment
For this assignment, (and generally the assignments that involve a programming component) you will need Python 3
I recommend that you use a virtual environment (or something similar) if you aren't already - for example, https://docs.python.org/3.7/tutorial/venv.html
To setup a virtual environment, follow these steps below, otherwise you can skip to Getting Python ACT-R
1. On any platform (Mac/Linux/Windows)
Create a virtual environment called actrEnv
username$ python3 -m venv actrEnv
2a. On a Mac/Linux machine, in the terminal
Activate environment called actrEnv
username$ source actrEnv/bin/activate
2b. On a Windows machine, in cmd
Activate environment called malmoEnv
actrEnv\Scripts\activate.bat
(Do not do this until you want to not use your)
To deactivate any virtual environment you are in
deactivate
You should see the name of your env next to your command line in the terminal/shell now, this is how you know that your virtual environment is activated
- For example it may look like this -
(malmoEnv) computer:project user1234$
This will hopefully help keep you from having to diagnose odd issues that come from quickly installing and uninstalling different software over the years.
Getting Python ACT-R
For this we will use a custom version of Python ACT-R that acts more nicely with Python3 than the versions listed on the CCM Lab website
- Make sure you have your virtual environment activated
- Go to - https://gitlab.bucknell.edu/AI-CogSci-Group/Py3ACTR.git to download the code
- Once you have the code downloaded, navigate into the top directory of downloaded files via terminal and activate whatever virtual environment that you are using
- install Python ACT-R by running
python setup.py install
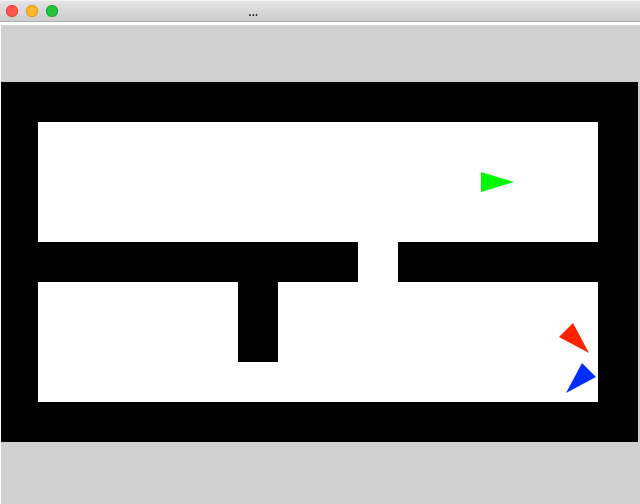
Ensure everything is working by navigating to tutorials/Grid World and running python 3_many_agents.py
If all works out, you should see a grid environment with agents moving around (similar to the figure below)
Your first Python ACT-R agent
Let's create our first Python ACT-R Agent
Create a new file called sandwich.py
The first thing you'll need in this file is the important statements to use the CCM/Python ACT-R library
# import ccm module library for Python ACT-R classes
import ccm
from ccm.lib.actr import *
Now let's create the actual agent
class SandwichBuilder(ACTR):
goal = Buffer()
sandwich = []
def init():
goal.set("build_sandwich 1 prep")
def prep_ingredients(goal="build_sandwich 1 prep"):
#start building our sandwich!
goal.set("build_sandwich 2 bottom_bread")
def place_bottom_bread(goal="build_sandwich 2 ?ingred"):
#Place the bottom piece of bread
sandwich.append(ingred)
goal.set("build_sandwich 3 mayo")
def place_mayo(goal="build_sandwich 3 ?ingred"):
sandwich.append(ingred)
goal.set("build_sandwich 4 turkey")
def place_turkey(goal="build_sandwich 4 ?meat"):
def place_cheese(goal="build_sandwich 5 ?cheese"):
def forgot_mayo(goal="build_sandwich 6 top_bread"):
def place_mayo_top(goal="build_sandwich 6 mayo"):
def place_top_bread(goal="build_sandwich 7 top_bread"):
self.stop
As a first try at creating your agent, try and finish the rules there so that the agent completes the sandwich
Be sure to include the code below, so that you have an empty environment to run the agent and a log that prints out
class EmptyEnvironment(ccm.Model):
pass
env_name = EmptyEnvironment()
agent_name = SandwichBuilder()
env_name.agent = agent_name
ccm.log_everything(env_name)
env_name.run()
python3 sandwich.py
When you're finished, you may (should) have something similar to this in your terminal:
0.000 agent.production_match_delay 0
0.000 agent.production_threshold None
0.000 agent.production_time 0.05
0.000 agent.production_time_sd None
0.000 agent.goal.chunk None
0.000 agent.goal.chunk build_sandwich 1 prep
0.000 agent.production prep_ingredients
0.050 agent.production None
0.050 agent.goal.chunk build_sandwich 2 bottom_bread
0.050 agent.production place_bottom_bread
0.100 agent.production None
0.100 agent.goal.chunk build_sandwich 3 mayo
0.100 agent.production place_mayo
0.150 agent.production None
0.150 agent.goal.chunk build_sandwich 4 turkey
0.150 agent.production place_turkey
0.200 agent.production None
0.200 agent.goal.chunk build_sandwich 5 provolone
0.200 agent.production place_cheese
0.250 agent.production None
0.250 agent.goal.chunk build_sandwich 6 mayo
0.250 agent.production place_mayo_top
0.300 agent.production None
0.300 agent.goal.chunk build_sandwich 7 top_bread
0.300 agent.production place_top_bread
0.350 agent.production None
Sandwich complete!
A Python ACT-R Rule agent in a simple grid environment
We need to create a simple agent that can traverse the board as needed
Now the more fun stuff. Let's create an agent to move around in a grid environment similar to the one you saw in a previous example
1st, create a new file called vacuumAgent.py
Below is a starter code for you to create a rule-based roomba-like agent
The idea is to implement the strategies reported to be used by some Roombas (broadly defined) to make your agent move around in the environment and clean dirty spots
These implementation details can be found a few places - https://www.cnet.com/news/appliance-science-how-robotic-vacuums-navigate/ - seems to describe it fairly well.
import ccm
log=ccm.log()
from ccm.lib import grid
from ccm.lib.actr import *
import random
mymap="""
################
# C#
# D #
# #
## ##
# DD #
# D D#
# DD#
################
"""
class MyCell(grid.Cell):
dirty=False
chargingsquare=False
def color(self):
if self.chargingsquare: return "green"
elif self.dirty: return 'brown'
elif self.wall: return 'black'
else: return 'white'
def load(self,char):
if char=='#': self.wall=True
elif char=='D': self.dirty=True
elif char=='C': self.chargingsquare=True
class MotorModule(ccm.Model):
FORWARD_TIME = .1
TURN_TIME = 0.025
CLEAN_TIME = 0.025
def __init__(self):
ccm.Model.__init__(self)
self.busy=False
def turn_left(self, amount=1):
if self.busy: return
self.busy=True
self.action="turning left"
yield MotorModule.TURN_TIME
amount *= -1
self.parent.body.turn(amount)
self.busy=False
def turn_right(self, amount=1):
if self.busy: return
self.busy=True
self.action="turning left"
yield MotorModule.TURN_TIME
self.parent.body.turn(amount)
self.busy=False
def turn_around(self):
if self.busy: return
self.busy=True
self.action="turning around"
yield MotorModule.TURN_TIME
self.parent.body.turn_around()
self.busy=False
def go_forward(self, dist=1):
if self.busy: return
self.busy=True
self.action="going forward"
for i in range(dist):
yield MotorModule.FORWARD_TIME
self.parent.body.go_forward()
self.action=None
self.busy=False
def go_left(self,dist=1):
if self.busy: return
self.busy="True"
self.action='turning left'
yield MotorModule.TURN_TIME
self.parent.body.turn_left()
self.action="going forward"
for i in range(dist):
yield MotorModule.FORWARD_TIME
self.parent.body.go_forward()
self.action=None
self.busy=False
def go_right(self):
if self.busy: return
self.busy=True
self.action='turning right'
yield 0.1
self.parent.body.turn_right()
self.action='going forward'
yield MotorModule.FORWARD_TIME
self.parent.body.go_forward()
self.action=None
self.busy=False
def go_towards(self,x,y):
if self.busy: return
self.busy=True
self.clean_if_dirty()
self.action='going towards %s %s'%(x,y)
yield MotorModule.FORWARD_TIME
self.parent.body.go_towards(x,y)
self.action=None
self.busy=False
def clean_if_dirty(self):
"Clean cell if dirty"
if (self.parent.body.cell.dirty):
self.action="cleaning cell"
self.clean()
def clean(self):
yield MotorModule.CLEAN_TIME
self.parent.body.cell.dirty=False
class ObstacleModule(ccm.ProductionSystem):
production_time=0
def init():
self.ahead=body.ahead_cell.wall
self.left=body.left90_cell.wall
self.right=body.right90_cell.wall
self.left45=body.left_cell.wall
self.right45=body.right_cell.wall
def check_ahead(self='ahead:False',body='ahead_cell.wall:True'):
self.ahead=True
def check_left(self='left:False',body='left90_cell.wall:True'):
self.left=True
def check_left45(self='left45:False',body='left_cell.wall:True'):
self.left45=True
def check_right(self='right:False',body='right90_cell.wall:True'):
self.right=True
def check_right45(self='right45:False',body='right_cell.wall:True'):
self.right45=True
def check_ahead2(self='ahead:True',body='ahead_cell.wall:False'):
self.ahead=False
def check_left2(self='left:True',body='left90_cell.wall:False'):
self.left=False
def check_left452(self='left45:True',body='left_cell.wall:False'):
self.left45=False
def check_right2(self='right:True',body='right90_cell.wall:False'):
self.right=False
def check_right452(self='right45:True',body='right_cell.wall:False'):
self.right45=False
class CleanSensorModule(ccm.ProductionSystem):
production_time = 0
dirty=False
def found_dirty(self="dirty:False", body="cell.dirty:True"):
self.dirty=True
def found_clean(self="dirty:True", body="cell.dirty:False"):
self.dirty=False
class VacuumAgent(ACTR):
goal = Buffer()
body = grid.Body()
motorInst = MotorModule()
cleanSensor = CleanSensorModule()
def init():
goal.set("rsearch left 1 0 1")
self.home = None
#----ROOMBA----#
def clean_cell(cleanSensor="dirty:True", motorInst="busy:False", utility=0.6):
motorInst.clean()
def forward_rsearch(goal="rsearch left ?dist ?num_turns ?curr_dist",
motorInst="busy:False", body="ahead_cell.wall:False"):
motorInst.go_forward()
print(body.ahead_cell.wall)
curr_dist = str(int(curr_dist) - 1)
goal.set("rsearch left ?dist ?num_turns ?curr_dist")
def left_rsearch(goal="rsearch left ?dist ?num_turns 0", motorInst="busy:False",
utility=0.1):
motorInst.turn_left(2)
num_turns = str(int(num_turns) + 1)
goal.set("rsearch left ?dist ?num_turns ?dist")
###Other stuff!
world=grid.World(MyCell,map=mymap)
agent=VacuumAgent()
agent.home=()
world.add(agent,5,5,dir=0,color="black")
ccm.log_everything(agent)
ccm.display(world)
world.run()
Note that for the rules above, you are free to modify, they are included to provide an example possibility.
What's going on above?
For starters we define rules within a class that represents our agent. This class must have ACTR as its parent class.
For now don't worry about the code above it that inherits from other classes (e.g., the MotorModule) these are abstractions that allow us to interact with the architecture in a principled way. For you, just know that they are an interface that is available for some small interaction with the environment.
Also notice the init() function: this is how we can essentially initialize our agent w/in ACT-R. It basically operates like a constructor.
Within this function, we set our initial goal (what we initially have in short-term memory when the simulation begins) and can set the value of any slots, which are represented as class instance attributes.
The goal buffer is one of the things we will use for keeping track of our current context. It provides a representation of short-term memory. (You may recall that STM is an important component of rule-based expert systems in general...in ACT-R this idea applies as well)
class VacuumAgent(ACTR):
goal = Buffer()
body = grid.Body()
motorInst = MotorModule()
cleanSensor = CleanSensorModule()
def init():
goal.set("rsearch left 1 0 1")
self.home = None
What about rules?
Rules are built within the class as functions (or methods if you prefer...but you'll notice in the snippet below that we don't really use a self as we would with a normal Python class method)
The argument list for a Rule (Function) provides the condition (LHS, if, etc.) and the body provides the action (RHS, then, etc.)
Within our argument list, we will generally specify the state of a buffer or module. It's not important to know much about these constructs, just that they are a way for us to encapsulate behavior and functionality in a separate entity.
def clean_cell(cleanSensor="dirty:True", motorInst="busy:False", utility=0.6):
motorInst.clean()
def forward_rsearch(goal="rsearch left ?dist ?num_turns ?curr_dist",
motorInst="busy:False", body="ahead_cell.wall:False"):
motorInst.go_forward()
curr_dist = str(int(curr_dist) - 1)
goal.set("rsearch left ?dist ?num_turns ?curr_dist")
def left_rsearch(goal="rsearch left ?dist ?num_turns 0", motorInst="busy:False",
utility=0.1):
motorInst.turn_left(2)
num_turns = str(int(num_turns) + 1)
goal.set("rsearch left ?dist ?num_turns ?dist")
Lets look at the forward_rsearch function a bit closer
def forward_rsearch(goal="rsearch left ?dist ?num_turns ?curr_dist",
motorInst="busy:False", body="ahead_cell.wall:False"):
motorInst.go_forward()
curr_dist = str(int(curr_dist) - 1)
goal.set("rsearch left ?dist ?num_turns ?curr_dist")
For our condition, we are testing whether the buffer goal (again, a representation of short-term memory) has slot values of "rsearch" and "left" (these are just a way to keep track of our current strategy or goal).
Statements such as ?dist tell the pattern matcher that we want the production to fire if there is some value in that third slot, but that we don't particularly care what it is for the purposes of matching the condition. This also creates a python variable with the same name.
Notice that we also use these variables to adjust the goal state and we even are able to use these variables in our action:
curr_dist = str(int(curr_dist) - 1)
The python variable curr_dist in the action/RHS comes from ?curr_dist in the condition/LHS.
We also use an instantiation of the MotorModule (and its state) and attributes of the body representation to specify additional constraints for the selection of this rule by the central production system.
Note that ACT-R has other cool features/theory that we don't get into to keep things simple for this assignment. If you want to use a cognitive architecture for any of your projects, we can talk and I can guide you.
Using more aspects of ACT-R would give us access to both the symbolic (e.g., rules and facts) and the subsymbolic (utility and activation) memory representations. The subsymbolic systems implement forms of bayesian and reinforcement learning.
What should be in my solution?
There are artifacts that you'll need to create along the way. I've separated them into stages to make it a bit easier to judge initial ordering. I'd assume you'd want to iterate through for some of these artifacts (e.g., the design) as you continue in the process. At the end I'll want the final version of all of these artifacts :-). I list the artifacts I expect to see at the end of this section
Stage 1 - Finish your SandwichBuilder and understand it, Suggested taret date to finish: 18-Apr-2021
- Finish the sandwich builder model
- Create a flow-diagram of how the model moves from one rule to the next
Stage 2 - VacuumCleaner design, Suggested target date to finish: 20-Apr-2021
- General AI Design
- I want you to use the General AI Design sheet to make come up with initial specifications for the Environment that the agent will be operating within, the Goals the agent will need to have within this environment, and the adaptation the agent will need to carry out to accomplish these Goals in the given Environment.
- Take this aspect seriously! The more you understand these three things, the easier the agent will be to design (in later stages) & implement!
- ACT-R agent design
- You'll need to understand what data you can perceive and how you might complete actions in the environment
- You should construct a high level design (e.g., similar to the flow-chart type diagram you made for your sandwich builder)
Stage 3 - Get the dang thing done!
Well now it's time to pull everything together and see what you come up with!
-
Use your initial designs to guide your code. Pay attention to the code provided for clues on how to make things work.
- In addition to asking me, don't forget to check the Python ACT-R website to gain a deeper understanding of how it works!
-
In addition to the initial Swirl Pattern, your vacuum cleaner should be able implement the Full implementation of the Roomba alg (implementing the wall tracing and straight random strategies mentioned in the linked article)
Deliverables (what do you need to do to get a good grade)
There are several parts to this assignment:
- Create a folder called
CogSciinside of your357-SP21git repo (This is where you'll submit your work) - The code
- Submit all the model code you create for this assignment. Comment the code where it makes sense
- I expect a README written in markdown that gives the detail of your code (how to use it, issues, etc.)
All non-code artifacts should be placed in a folder called
docsin yourNNfolder.
- Model Designs
- Create a folder called
docswithin yourCogScifolder to hold these design documents - Submit the flow-diagram type designs created for the Sandwich model and your VacuumCleaner model
- Submit the General AI Design sheet for your vacuum cleaner model
- Create a folder called
- Future planning.pdf
- Submit a PDF called
future_plans.pdfthat details what you would implement in a future model and how you might use the memory/learning parts of the architecture. Would you use Reinforcement Learning? Declarative memory? (Check the Stewart article for a bit more information on those mechanisms).
- Submit a PDF called
Create your own folder for this assignment called PyACTR-RBES
- Follow the assignment creation steps for other assignments that involve programming as well unless otherwise specified
- By using Gitlab, I can also pull your code and try it out remotely if we run into an impasse and/or are dealing with a deadline
Grading
This assignment has some fairly straightforward grading (some partial credit is implicit) We can think about this assignment as being out of 14 points
- 8 points: Have your agent do a swirl pattern strategy (like the Roomba alg we're trying to mimic) and OK documentation
- Documentation here includes a README
- 2 points:
- Great documentation
- Full implementation of the Roomba alg (implementing the wall tracing and straight random strategies mentioned in the linked article)
- creativity (e.g., trying other algorithms that work in concert with the swirl strategy)
- 2 points
- Model Design
- 2 point
- Future Plans
Document your code
Document your code
Document your code
Document your code
References
Dancy, C. L., Ritter, F. E., Berry, K. A., & Klein, L. C. (2015). Using a cognitive architecture with a physiological substrate to represent effects of a psychological stressor on cognition. Computational and Mathematical Organization Theory, 21(1), 90-114.